New ! Flywoo Naked Gopro 2.0 GP12 Pro
7-Day No Reason Return
English
United States(USD $)
Sign In
What's New
Drones
CineWhoop/Cinelift
Long Range Drone
Micro Drone
Tiny Drone
Drone Parts
Antenna
Batteries/Chargers
Cameras
Electronics
Frames
FPV Gears
Fpv Motors
Propellers
Accessories
Support
Support Center
Track order
Find A Dealer
Download Invoice
Rewards
Contact Us
New Website FAQ
Affiliate
Policies
Payment
Shipping Policy
Warranty Policy
Return & Refund Policy
7-Day No Reason Return Policy
Flywoo AliExpress
FLYWOO
What's New
Drones
Drone Parts
Support
Affiliate
Policies
Flywoo AliExpress
Sign In
0.00
What's New
Drones
CineWhoop/Cinelift
Long Range Drone
Micro Drone
Tiny Drone
Drone Parts
Antenna
Batteries/Chargers
Cameras
Electronics
Frames
FPV Gears
Fpv Motors
Propellers
Accessories
Support
Support Center
Track order
Find A Dealer
Download Invoice
Rewards
Contact Us
New Website FAQ
Affiliate
Policies
Payment
Shipping Policy
Warranty Policy
Return & Refund Policy
7-Day No Reason Return Policy
Flywoo AliExpress
Shopping Cart
Naked Gopro,GP9,GP10,GP11,GP12
Naked Gopro,GP9,GP10,GP11,GP12
Flywoo Action Camera V2 Pro
Flywoo Action Camera V2 Pro
Innovative Design I Lightweight Durability I Versatile Shooting Angles
Innovative Design I Lightweight Durability
Enable/disable 10V I MPU6000
Enable/disable 10V I MPU6000
GOKU F722 PRO\MINI V2 STACK
GOKU F722 PRO\MINI V2 STACK
Modular installation, easy connection, and the joy of assembly.
Modular installation, easy connection, and the joy of assembly.
Less then 78g I Indoor I Cinematic
Less then 78g I Indoor I Cinematic
FLYLENS 75 2S WHOOP
FLYLENS 75 2S WHOOP
Small yet but powerful - The perfect solution for micro drone videograhpy
Small yet but powerful - The perfect solution for micro drone videograhpy
Sub250 I 4k 1080p I 8mins
Sub250 I 4k 1080p I 8mins
FlyLens 85 2S Whoop
FlyLens 85 2S Whoop
Explore new horizons with our innovative flying solutions
Explore new horizons with our innovative flying solutions
Featured Products
View All
14% OFF
DJI Goggles 2
$
599.99
USD
$
699.99
USD
GOKU F722 PRO V2 50A BLS 30X30 Stack (MPU6000)
$
79.99
USD
GOKU F722 PRO Mini V2 40A BLS 20X20 Stack
$
69.99
USD
Flywoo Naked Gopro Action Camera V2 GP9 / GP10 / GP11 / GP12 Pro
Flywoo Action Camera V2 Pro: Experience revolutionary advancements on the base of its predecessor. This upgraded marvel comes packed with a suite of u...
From
$
69.99
USD
Walksnail Avatar HD Goggles X (New Version)
$
459.00
USD
FlyLens 75 HD O3 \O3 Lite 2S Brushless Whoop FPV Drone
⭕Compact and Lightweight 1.6'' Drone Design ⭕Shock Absorption Platform Design ⭕Reverse Thrust Power System ⭕O3 Lite takeoff weight of less than 100g ...
From
$
399.00
USD
FlyLens 85 HD O3 2S Brushless Whoop FPV Drone
⭕Lightweight and compact design ⭕High-strength protective ring for enhanced durability and safety. ⭕Unique CNC damping platform for smooth and high-qu...
From
$
429.99
USD
Sold out
TBS Tango 2 PRO FPV RC Radio Controller (new version)
$
279.99
USD
$
299.99
USD
What's New
View All
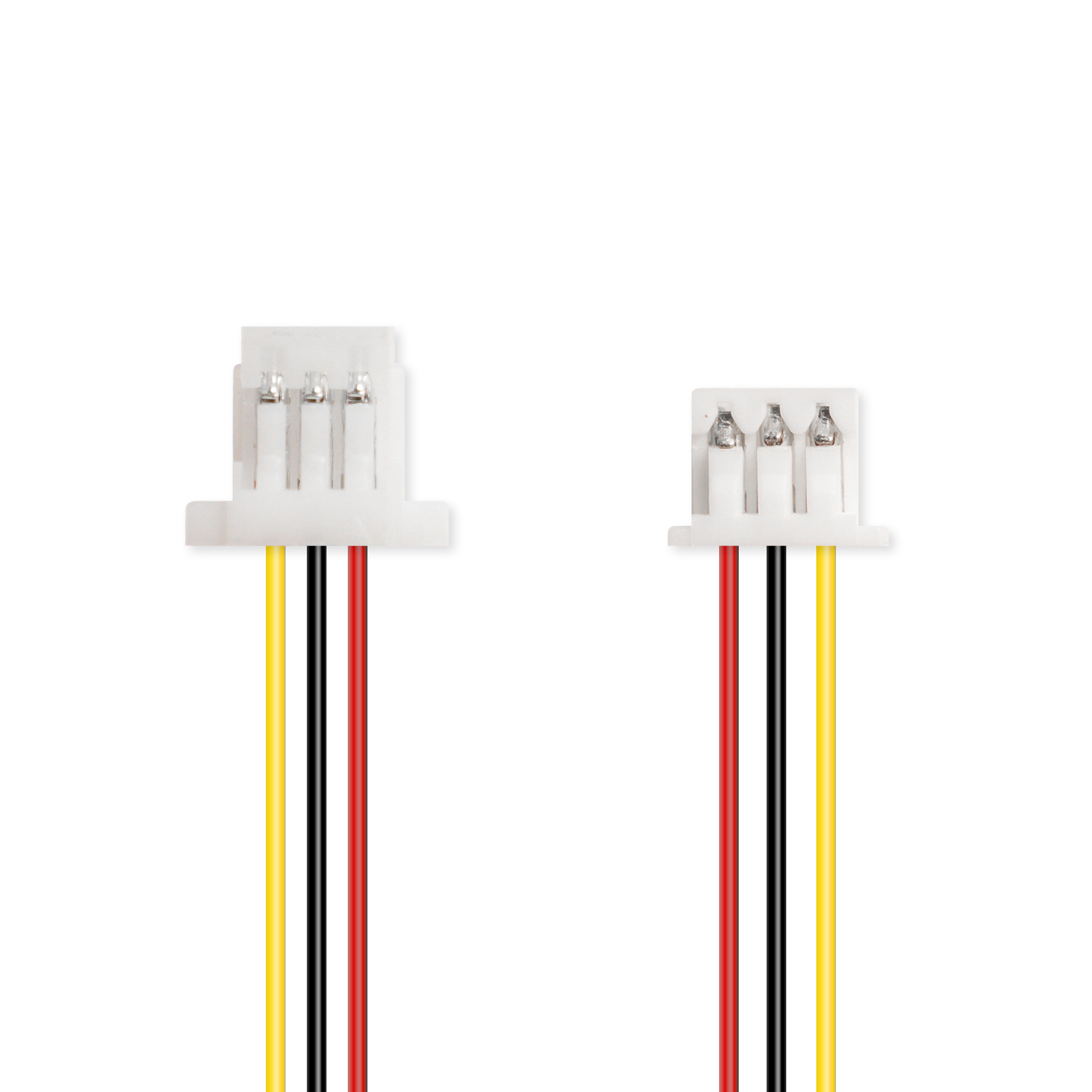
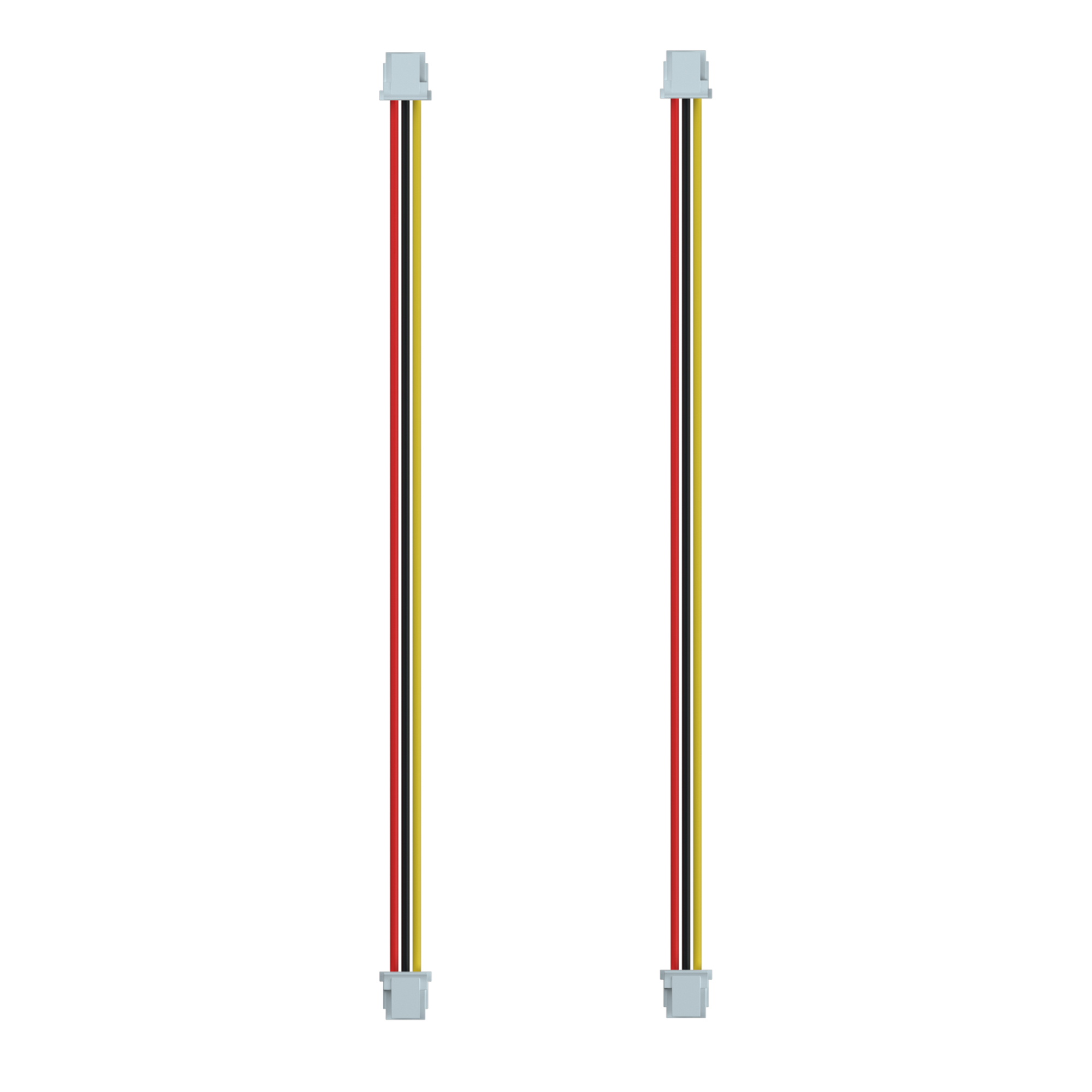
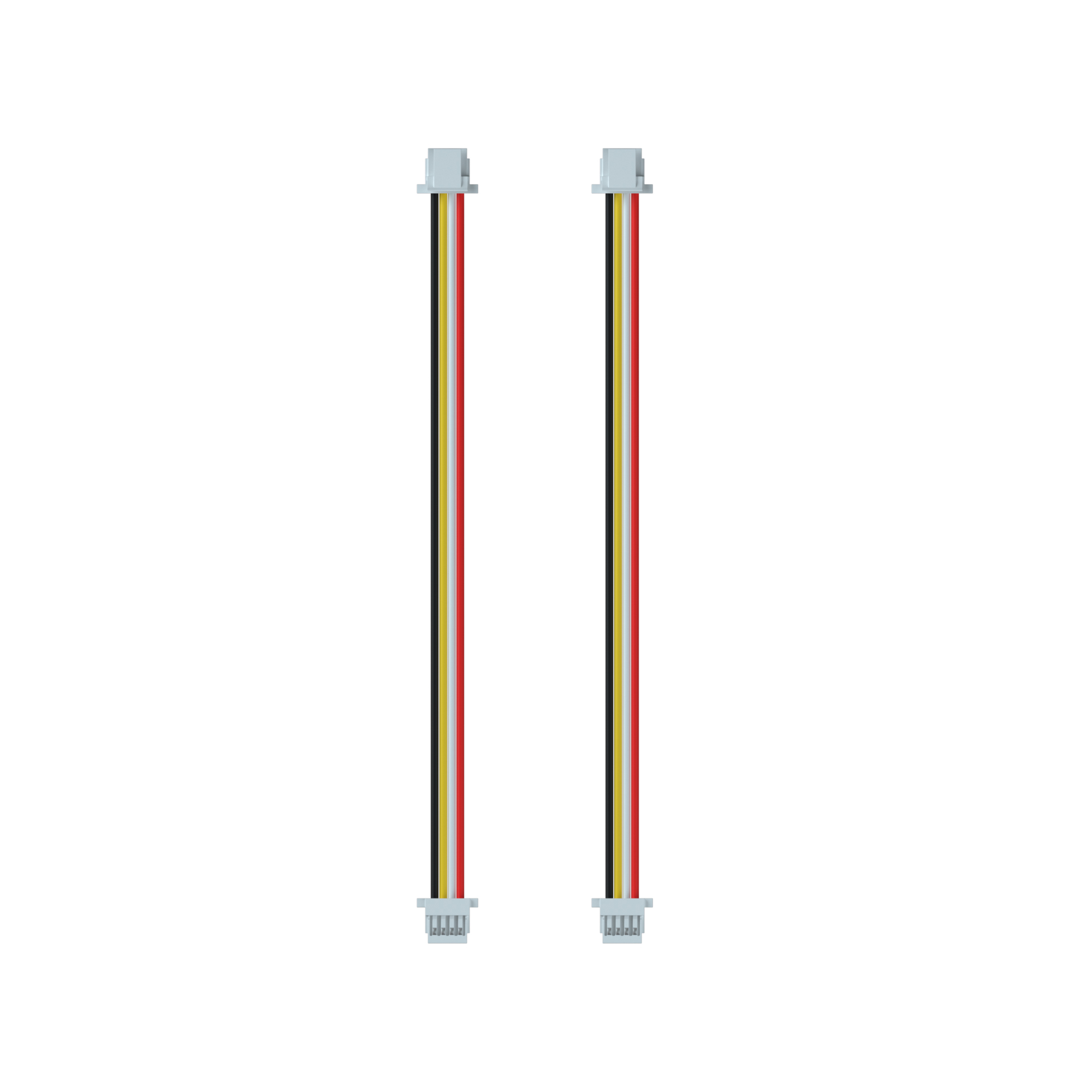
Flywoo 2PCS JST SH 1.0mm 3P (w/lock) to SH 1.25mm 3P to FC to Cam Connection Cable
$
2.99
USD
Flywoo 2PCS JST SH 1.0mm 4Pins 4P(w/lock) to 4P(w/lock) FC to GPS Connection Cable
$
2.99
USD
Flywoo 2PCS JST SH 1.0mm 4Pins (w/lock) Pigtail FC to Buzzer or Receiver Connection Cable
$
2.99
USD
Flywoo 2PCS JST SH 1.0mm 8Pins 8P to 8P FC to ESC Connection Cable
$
2.99
USD
Flywoo 2PCS JST SH 1.0mm 6Pins 6P to 6P O3 & Flight Controller Connection Cable
$
2.99
USD
Flywoo Naked O3 UV ND Filters V2
From
$
12.99
USD
Handheld support TPU bracket for Flylens 75\85
$
9.99
USD
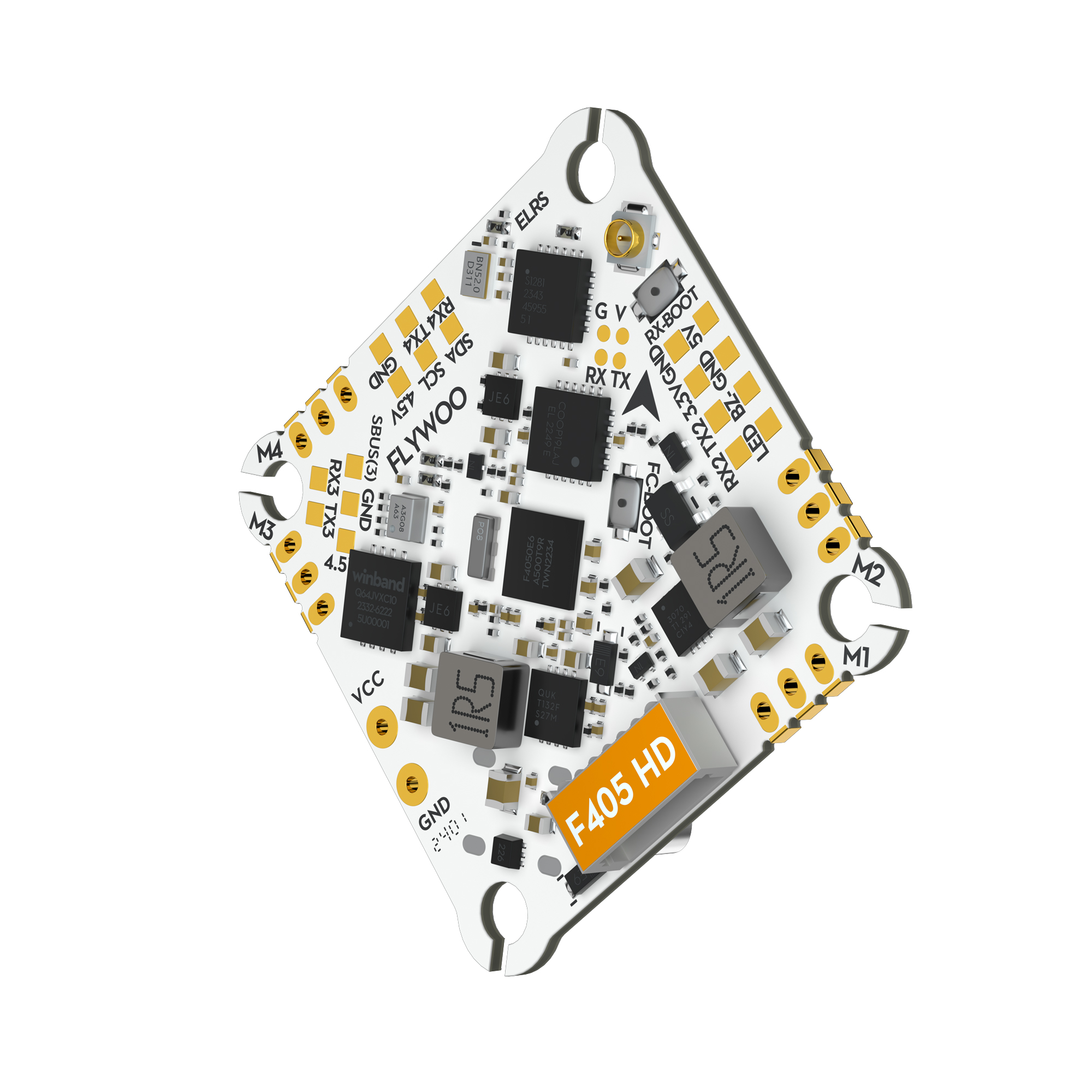
GOKU F405 HD 1-2S ELRS AIO V2
From
$
59.99
USD
Clearance Sale
View All
50% OFF
DJI O3 Air Unit Antenna
$
9.99
USD
$
19.99
USD
75% OFF
CineRace20 Double Duct for Analog \ Vista \ Walksnail (Clearance)
$
1.99
USD
$
7.99
USD
40% OFF
NIN 2104 Ultralight Fpv Motor 1800kv / 3000kv ( Silver )
$
11.99
USD
$
19.99
USD
36% OFF
(1MB FLASH) GOKU HD 745 EVO 40A AIO BL_32 DJI PLUS & PLAY MPU6000(20mm X 20mm )
$
89.99
USD
$
139.99
USD
35% OFF
Caddx Baby Ratel 2 1200TVL 1.8mm FPV Camera
$
19.99
USD
$
30.99
USD
30% OFF
NIN 2303.5 Ultralight Fpv Motor 1750kv / 3000kv ( Silver )
$
13.99
USD
$
19.99
USD
70% OFF
Flywoo ATOMIC 5.8GHz RHCP FPV Antenna For Analog FPV(Clearance )
From
$
2.99
USD
$
9.99
USD
70% OFF
Flywoo ATOMIC 5.8GHz LHCP FPV Antenna For Dji Digital FPV
From
$
2.99
USD
$
9.99
USD
FLYWOO-CRAB 220mm Frame Kit
$
49.99
USD
50% OFF
Nini 2207\2207.5 Bell (Clearance)
$
4.99
USD
$
9.99
USD
Sold out
Flywoo Ant V2 ultralight micro 3'' Titanium Frame kit
$
39.99
USD
Sold out
Caddx Peanut action camera
$
269.99
USD
50% OFF
DJI O3 Air Unit Antenna
$
9.99
USD
$
19.99
USD
75% OFF
CineRace20 Double Duct for Analog \ Vista \ Walksnail (Clearance)
$
1.99
USD
$
7.99
USD
40% OFF
NIN 2104 Ultralight Fpv Motor 1800kv / 3000kv ( Silver )
$
11.99
USD
$
19.99
USD
36% OFF
(1MB FLASH) GOKU HD 745 EVO 40A AIO BL_32 DJI PLUS & PLAY MPU6000(20mm X 20mm )
$
89.99
USD
$
139.99
USD
35% OFF
Caddx Baby Ratel 2 1200TVL 1.8mm FPV Camera
$
19.99
USD
$
30.99
USD
30% OFF
NIN 2303.5 Ultralight Fpv Motor 1750kv / 3000kv ( Silver )
$
13.99
USD
$
19.99
USD
70% OFF
Flywoo ATOMIC 5.8GHz RHCP FPV Antenna For Analog FPV(Clearance )
From
$
2.99
USD
$
9.99
USD
70% OFF
Flywoo ATOMIC 5.8GHz LHCP FPV Antenna For Dji Digital FPV
From
$
2.99
USD
$
9.99
USD
FLYWOO-CRAB 220mm Frame Kit
$
49.99
USD
50% OFF
Nini 2207\2207.5 Bell (Clearance)
$
4.99
USD
$
9.99
USD
Sold out
Flywoo Ant V2 ultralight micro 3'' Titanium Frame kit
$
39.99
USD
Sold out
Caddx Peanut action camera
$
269.99
USD
Free shipping
Free shipping for global orders above $100.
Secure Payment
Debit or credit card, PayPal and bank transfer.
30-Day Warranty
Drones come with a 30-day Warranty.
Flywoo Credit
100 points can be redeemed for $1.













-1.jpeg?w=2000&h=2000)